
Attitude control
Contactless attitude control
レーザーを用いたスペースデブリ除去が計画されています。ロボットアームやテザーを用いる手法に比べ、力とトルクを非接触で与えることができるため、高い安全性が確保されます。
その一方で、力の発生原理から、レーザー照射面に対して垂直方向にのみ力が発生可能という制約があります。そのためデブリを効率的に除去するためには、デブリの姿勢を安定化する必要があり、さらにその姿勢制御トルクの発生方向も制約されます。このような発生トルク方向制約下における姿勢制御則の研究を行っています。例えばSakaiらは、トルクの発生方向制約が磁気姿勢制御と類似していることに着目し、姿勢制御手法の導出を行いました。
さらに制御ゲインの決定方法に着目し,Hayashibaraらは角運動量フィードバックによる新しい姿勢制御手法を提案しました.姿勢と角速度の目標値との差を両方とも角運動量で表現することにより,制御ゲインの数を減らし,有効な制御ゲインの閾値を求めました.
Magnetic attitude control

磁気トルカを用いた姿勢制御は,燃料を必要とせず,アクチュエータ自身も小型であることから超小型衛星にも多く用いられます.磁気トルクは地球磁場との干渉によって発生するため,その発生トルクは地球磁場に対して常に垂直方向という制約があります.そのため姿勢制御に必要な方向(と大きさ)のトルクを精確に発生することができません.そのため磁気姿勢制御は本質的に劣駆動システムであるといえます.
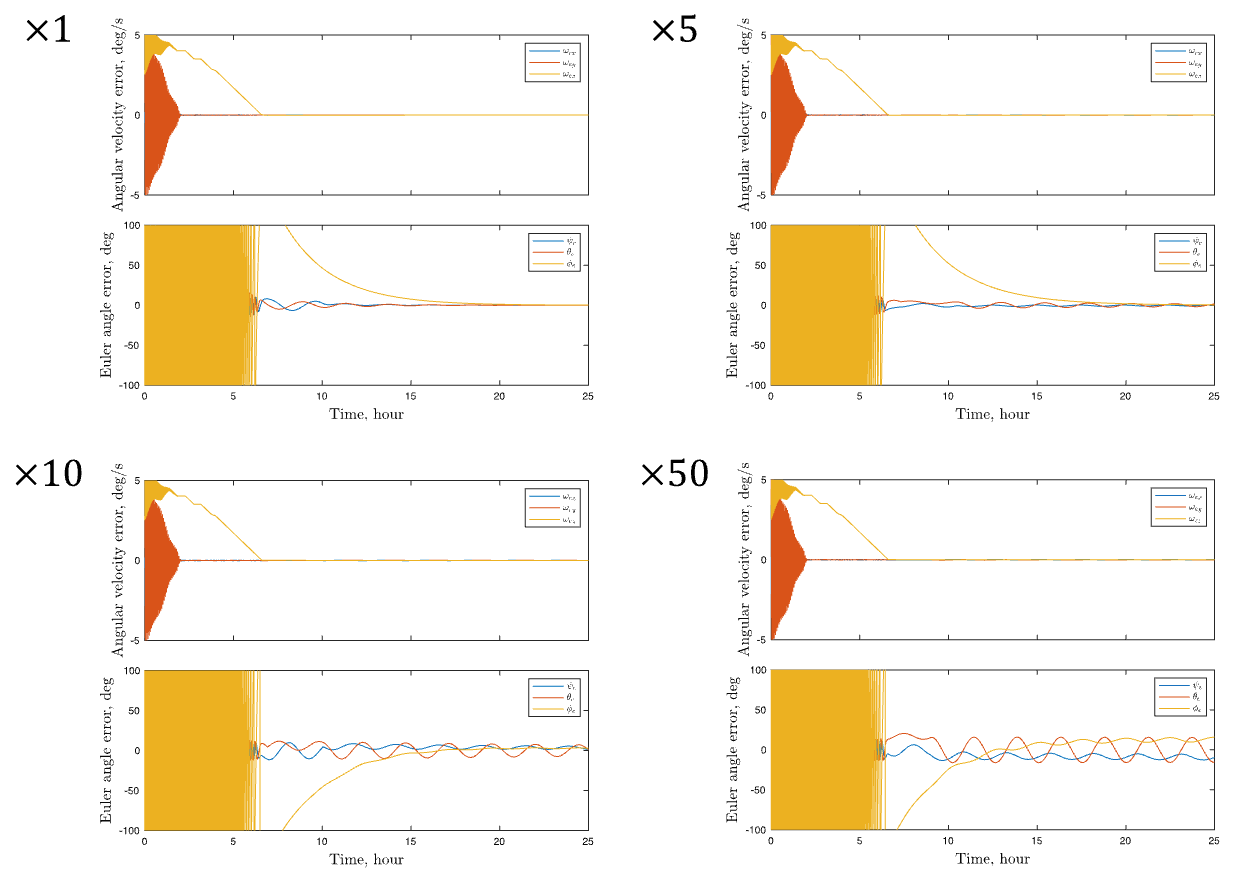
磁気姿勢制御本来の劣駆動性に加え,磁気トルカひとつのみで姿勢制御する研究を行っています。磁気トルカがひとつの場合、衛星に対して発生できる磁気モーメントも1軸に限られます。Kondoらはそのようなシステムに対して非線形モデル予測制御(nonlinear model predictive control, NMPC)を用いた制御則を導出しました。